外してヤツ、やっぱ付けました。

砂井さんのZwiftトレーニングの要、
Tacx NEO Smartはケイデンス・センサー内蔵です。
自転車からセンサーを外せるのでバッテリー切れ等の心配も無く、フレームの見た目もスッキリです。

でも世の中そんなに甘くはアリマセン。
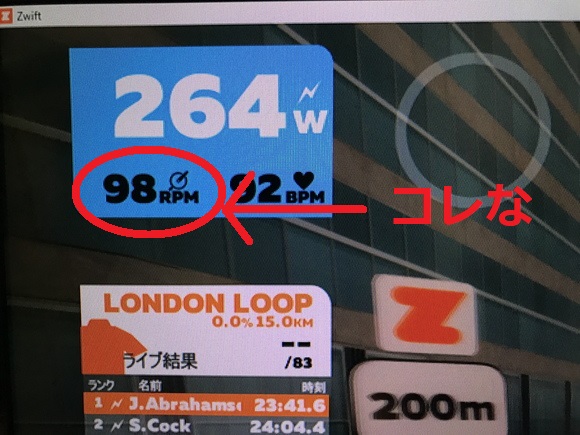
Zwift内のケイデンス表示が結構適当なのよ。
写真は無いんですが、
●ケイデンスの誤差が大きい時がある
Tacx NEO Smartは実際にケイデンスを測っているのではなく、負荷ユニットのトルク変動値から演算しているので特に低負荷で高ケイデンスとかだと誤差が大きくなったりするそうです。
この為、タマに下り勾配でダラダラ~と漕いでいるとケイデンスが突然200rpm!とか表示される事があります。
●レスポンスが悪い
ケイデンスを変動させた時に数値の追従が遅い時があります(タマにね)。
砂井さんは高ケイデンスが苦手なのでケイデンス変動系のトレーニングもするんですが、回転数の変化の追従に時間がかかる事がありますね。
ケイデンスはZwift内でのスピードとかに影響は無いのですが、正確な数値が出ないのは精神衛生上良くありません。
( ^ω^)・・・
センサー戻そう ( ´∀` )

そんな訳でガーミン純正のケイデンスセンサーを戻しました。
センサーは旧型です。
新型センサーのクランクにゴムバンドで固定するアレはね、
なんか見た目がね (;´・ω・)
早速試走してみる。
あ~~~⤴ 追従が速い!
ケイデンスを変化させると値もキッチリ追従します。
体感的にレスポンスは2倍以上。
いや~、スッキリですわ~ ( ´∀` )
直接関係ないですが、

センサーを付ける時にフレームの汚れに気が付きました。
チェーンステーの辺り結構汚い (;´Д`)

一度気になると寝られないワタクシ。
紙ウエスにパーツクリーナーでゴシゴシです。

普段拭かないトコまでフキフキ。
電動コンポ用フレームじゃないんで配線の取り回しがカッコ悪いですね (;´・ω・)

キタねーな (;´・ω・)
今度大々的にバラして洗車&WAXしよ。
コメントする